



Zintegrowane stanowisko w robotyce kosmicznej
Zintegrowane stanowisko do testów środowiskowych interfejsów do chwytania oraz dokowania, stosowanych w robotyce kosmicznej – TesVAC MGSE.
W artykule opublikowanym w miesięczniku MECHANIK 2/2019 autorzy: Filip Czubaczyński, Philippe Preumont oraz Paweł Wittels opisują koncepcję oraz projekt mechaniczny aplikacji do testów środowiskowych interfejsów stosowanych w robotyce kosmicznej. Przedstawiają także stan techniki, opis mechaniczny i funkcjonalny proponowanego rozwiązania, metodykę projektowania oraz napotkane problemy trybologiczne oraz proponują zakres dalszych prac.
Na potrzeby badań kosmicznych mechanizmów do chwytania oraz dokowania docelowe środowisko pracy może być symulowane w laboratoriach na Ziemi. Jest wiele rodzajów symulatorów, wykorzystujących modele komputerowe oraz fizyczne. Wśród symulatorów używających modeli fizycznych można wymienić zrobotyzowane stanowiska do badań dynamicznych i termiczno-próżniowych.
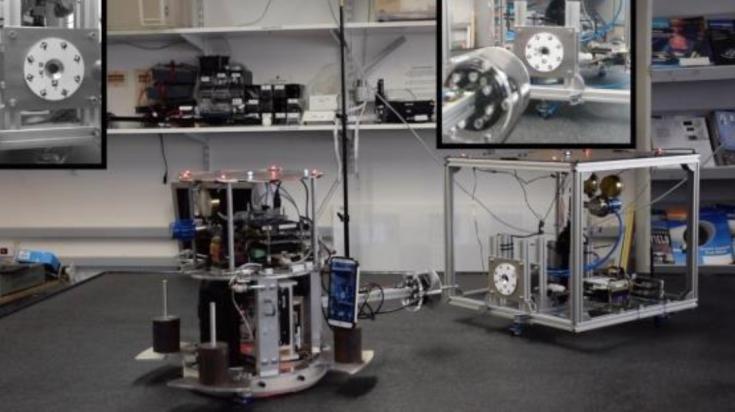
Roboty mobilne stosuje się najczęściej w badaniach dynamicznych w jednej płaszczyźnie. Przykładem takiego systemu jest symulator robota kosmicznego w NTUA Control Systems Laboratory (rys. 1) [1, 2]. Składa się on z aktywnych oraz pasywnych platform. Platformy poruszają się po granitowym stole zapewniającym płaskość na poziomie 5 μm oraz niską chropowatość powierzchni. Roboty przemieszczają się na poduszkach powietrznych, co pozwala na symulację zjawiska naturalnej pływalności występującego na orbicie. Ograniczeniem tego stanowiska testowego jest możliwość ruchu tylko w jednej płaszczyźnie.
Pełna wersja artykułu dostępna jest na stronie miesięcznika Mechanik.
Źródło: Readakcja Mechanik
- Praktyczna wiedza od ekspertów Beckhoff
- Robotyzacja zakładów mięsnych: Moda czy innowacja?
- Ulga na robotyzację - do kiedy można skorzystać?
- Raport: Przegląd Rynku Robotów Współpracujących (Cobotów)
- Raport: Rynek robotów mobilnych AGV i AMR w 2025
- Rynek robotów współpracujących — perspektywy na rok 2025
- Dyrektywa maszynowa: Co zmienia się od 2027 w robotyzacji?
- Rynek robotów przemysłowych: silne odbicie w 2025?
- Przegląd liderów rynku robotów przemysłowych
- ABB sprzedaje swój biznes Robotyki
- Elastyczny przepływ materiałów dzięki VarioFlow plus
- Cobot czy robot przemysłowy?
- Czy Coboty Są Bezpieczne? Fakty i mity
- Co to są roboty mobilne AMR i AGV i jak działają?
- Zastosowanie robotów mobilnych AMR i AGV w przemyśle
- Coboty vs. Roboty Przemysłowe – Różnice, Zalety i Przyszłość
- 7 wskazówek jak dobrać robota do linii produkcyjnej
- FANUC otworzył nową siedzibę we Wrocławiu
- Jak dobrać panel HMI do aplikacji przemysłowej?
- MIK: przemysł trzyma poziom
- Jaki sterownik PLC wybrać?
- Firmy przyspieszają wdrażanie AI. Raport PwC
- Raport World Robotics 2025 IFR
- 5 globalnych trendów robotyki na 2026 rok od IFR
- AI zmienia roboty przemysłowe - Raport IFR
- Coboty a nowa dyrektywa maszynowa, co się zmienia?
- Dokładność vs powtarzalność robota przemysłowego
 Chwytak do robota elektryczny 3-palczasty - gdzie zastosować?
Elektryczny chwytak 3-palczasty od SCHUNK – nowy poziom precyzji w robotyce przemys...
Chwytak do robota elektryczny 3-palczasty - gdzie zastosować?
Elektryczny chwytak 3-palczasty od SCHUNK – nowy poziom precyzji w robotyce przemys...
 Robotyzacja produkcji na miarę XXI wieku
Coraz więcej firm, chcąc usprawnić proces produkcyjny w swoim zakładzie, decyduje się na ...
Robotyzacja produkcji na miarę XXI wieku
Coraz więcej firm, chcąc usprawnić proces produkcyjny w swoim zakładzie, decyduje się na ...
 Roboty Kawasaki w fabryce farb Śnieżka
Aby spełnić wysokie wymagania jakościowe, Zarząd Fabryki Farb i Lakierów Śnieżka S....
Roboty Kawasaki w fabryce farb Śnieżka
Aby spełnić wysokie wymagania jakościowe, Zarząd Fabryki Farb i Lakierów Śnieżka S....
 #NoyenRobotics - Foliarka
Specjalnością firmy NOYEN poza myciem przemysłowym jest również automatyzacja proce...
#NoyenRobotics - Foliarka
Specjalnością firmy NOYEN poza myciem przemysłowym jest również automatyzacja proce...
 Wykorzystaj rabat na Konferencję Smart Factory World
W nowoczesnym procesie produkcyjnym kluczowy jest dostęp do aktualnych informacji umożliw...
Wykorzystaj rabat na Konferencję Smart Factory World
W nowoczesnym procesie produkcyjnym kluczowy jest dostęp do aktualnych informacji umożliw...






















