
Profil firmy
 Czym jest system LOTO w celi zrobotyzowanej i czy może być smart?
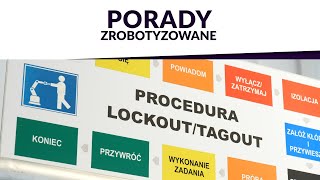
Przepisy dotyczące bezpieczeństwa w miejscu pracy wymagają od pracodawców opracowania systemu pracy, zapewniającego bezpieczeństwo na stanowisku pracy oraz izolowanie maszyn i innego sprzętu roboczego od źródeł energii w sposób, który nie spowoduje przypadkowego ponownego wzbudzenia energii.System Lock out Tag out to jed...
Czym jest system LOTO w celi zrobotyzowanej i czy może być smart?
Przepisy dotyczące bezpieczeństwa w miejscu pracy wymagają od pracodawców opracowania systemu pracy, zapewniającego bezpieczeństwo na stanowisku pracy oraz izolowanie maszyn i innego sprzętu roboczego od źródeł energii w sposób, który nie spowoduje przypadkowego ponownego wzbudzenia energii.System Lock out Tag out to jed...
 Jak wykryć obecność osób we wnętrzu celi zrobotyzowanej?
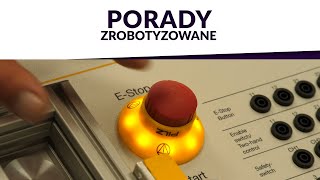
Dodatkowym zabezpieczeniem celi robota jest zastosowanie urządzeń wykrywających obecność człowieka w obszarze pracy robota. Takimi rozwiązaniami czułymi na nacisk będą m.in. listwy oraz maty na podłodze, lub na ruch, takie jak skanery czy czujniki ruchu. Strefy wejścia do obszaru pracy powinny być zabezpieczone elektroryglami, wraz z systemem autom...
Jak wykryć obecność osób we wnętrzu celi zrobotyzowanej?
Dodatkowym zabezpieczeniem celi robota jest zastosowanie urządzeń wykrywających obecność człowieka w obszarze pracy robota. Takimi rozwiązaniami czułymi na nacisk będą m.in. listwy oraz maty na podłodze, lub na ruch, takie jak skanery czy czujniki ruchu. Strefy wejścia do obszaru pracy powinny być zabezpieczone elektroryglami, wraz z systemem autom...
 Jak wygląda pomiar siły w przypadku kolizji człowieka z robotem?
W roku 2016 została opublikowana ISO/TS 15066 „Robots and robotic devices – Collaborative robots” – specyfikacja techniczna, która w załączniku A opisuje w sposób szczegółowy jakie siły i naciski jednostkowe mogą być wywarte na operatora. Opis ten powstał na podstawie modelu ludzkiego ciała złożonego z 2...
Jak wygląda pomiar siły w przypadku kolizji człowieka z robotem?
W roku 2016 została opublikowana ISO/TS 15066 „Robots and robotic devices – Collaborative robots” – specyfikacja techniczna, która w załączniku A opisuje w sposób szczegółowy jakie siły i naciski jednostkowe mogą być wywarte na operatora. Opis ten powstał na podstawie modelu ludzkiego ciała złożonego z 2...
 Jak bezpiecznie ograniczyć przestrzeń pracy robota?
Kiedy człowiek i robot dzielą wspólną przestrzeń roboczą, niezwykle istotna staje się kwestia bezpieczeństwa. W praktyce oznacza to konieczność indywidualnego przeanalizowania każdej aplikacji pod kątem bezpieczeństwa. Dzięki robotom nowej generacji, robotom współpracującym, czyli tzw. cobotom, sytuacja w robotyce ulega sporym zmiano...
Jak bezpiecznie ograniczyć przestrzeń pracy robota?
Kiedy człowiek i robot dzielą wspólną przestrzeń roboczą, niezwykle istotna staje się kwestia bezpieczeństwa. W praktyce oznacza to konieczność indywidualnego przeanalizowania każdej aplikacji pod kątem bezpieczeństwa. Dzięki robotom nowej generacji, robotom współpracującym, czyli tzw. cobotom, sytuacja w robotyce ulega sporym zmiano...
 Czy kontakt z pracującym robotem może być bezpieczny?
Do bezpośredniego kontaktu operatora z robotem, który może dojść m.in. podczas programowania robota, w trakcie współpracy z robotem oraz podczas napraw i konserwacji. Standardowo wyznacza się trzy poziomy stref ochronnych: wykrywanie obecności pracownika na granicy stanowiska zrobotyzowanego, wykrywanie obecności człowieka w obszarze...
Czy kontakt z pracującym robotem może być bezpieczny?
Do bezpośredniego kontaktu operatora z robotem, który może dojść m.in. podczas programowania robota, w trakcie współpracy z robotem oraz podczas napraw i konserwacji. Standardowo wyznacza się trzy poziomy stref ochronnych: wykrywanie obecności pracownika na granicy stanowiska zrobotyzowanego, wykrywanie obecności człowieka w obszarze...
 Dlaczego ocena ryzyka jest niezbędna przy projektowaniu systemu zrobotyzowanego?
W aplikacjach zrobotyzowanych największe ryzyko dla operatora powstaje podczas programowania w celi, odblokowywania zacięć i czyszczenia np. pistoletów do malowania lub spawalniczych czy narzędzi tnących. W przypadku podjęcia środków zmniejszających ryzyko należy rozważyć m.in. optymalny kształt i powierzchnię efektora końcowego, np....
Dlaczego ocena ryzyka jest niezbędna przy projektowaniu systemu zrobotyzowanego?
W aplikacjach zrobotyzowanych największe ryzyko dla operatora powstaje podczas programowania w celi, odblokowywania zacięć i czyszczenia np. pistoletów do malowania lub spawalniczych czy narzędzi tnących. W przypadku podjęcia środków zmniejszających ryzyko należy rozważyć m.in. optymalny kształt i powierzchnię efektora końcowego, np....



























